







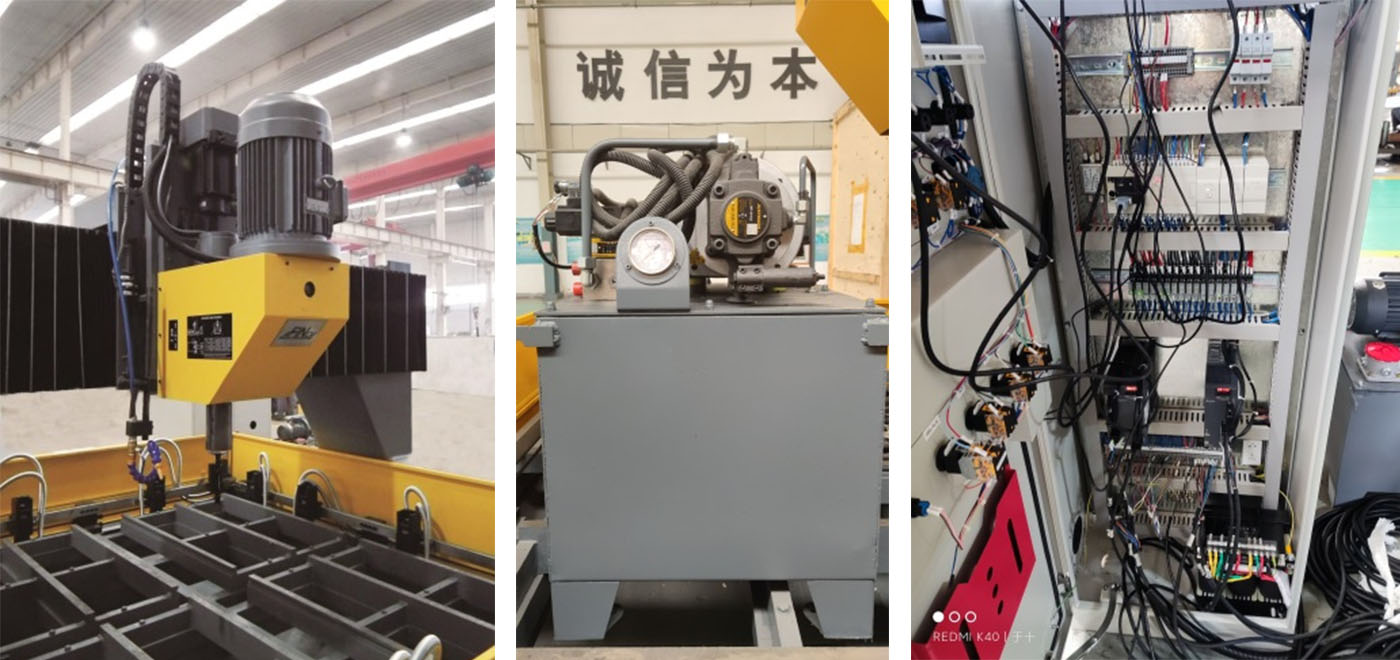
Machin Forage CNC Mobil Gantry PLD3030A ak PLD4030




| Inon tèm | Paramèt | ||
| PLD3030A | PLD4030 | ||
| Maksimòm machinasyonplakgwosè | Longè x Lajè | 3000x3000mm | 4000 * 3000mm |
| Epesè | 200mm | 100mm | |
| Travaytab | Dimansyon lajè T-groove | 22mm | |
| Tèt pouvwa perçage | Qkantite | 2 | 1 |
| Maksimòm perçagetwoudyamèt | Φ12mm-Φ50mm | ||
| RPM(konvèsyon frekans) | 120-450r/min | ||
| Morse taper nan file koton | NO 4 | ||
| Pouvwa motè file koton | 2x7.5kW | 5.5KW | |
| Distans soti nan figi anba afile kotonsou tab travay la | 200-550mm | ||
| Mouvman longitudinal gantry a (X-aks) | Vwayaj aks X la | 3000mm | |
| Vitès mouvman aks X la | 0-8m/minit | ||
| Pouvwa motè sèrvo aks X la | 2x2.0kW | ||
| Presizyon pozisyon aks X la | 0.1mm/Antye | ||
| Mouvman lateral tèt pouvwa a (Aks Y) | Distans maksimòm ant de tèt pouvwa nan aks Y la | 3000mm | |
| Distans minimòm ant de tèt pouvwa sou aks Y la | 470mm | ||
| Pouvwa motè sèrvo aks Y la | 1.5KW | ||
| Mouvman tèt pouvwa a | Vwayaj aks Z | 350mm | |
| Pouvwa motè sèrvo aks Z la | 2 * 2KW | ||
| CONVEYOR CHOC ak refwadisman | Pouvwa motè transporteur chip | 0.75KW | |
| Pouvwa motè ponp refwadisman | 0.45KW | ||
| Esistèm elektrik | Puisans motè total | Anviwon 30kW | A pwopo20kW |
| Dimansyon jeneral machin zouti a | Anviwon 6970x6035x2990mm | ||
1. Dyamèt maksimòm perçage machin zouti a se 50mm, epesè maksimòm plak perçage a se 200mm, epi gwosè maksimòm plak la se 3000x3000mm.
2. Machin zouti a ekipe ak de tèt pouvwa perçage glisman servo endepandan.
3. Pozisyon kowòdone twou a ka byen vit pozisyone nan yon vitès 8m / min, epi tan oksilyè a relativman kout.
4. Motè file koton nan tèt pouvwa perçage a adopte regilasyon vitès konvèsyon frekans san chanjman, epi vitès manje a adopte regilasyon vitès servo san chanjman, ki pratik pou opere.
5. Apre yo fin mete kou manje perçage a, li gen fonksyon kontwòl otomatik la.
6. Twou konik file koton an se Morse No 4, epi li ekipe ak yon manch reduktè Morse No 4/3, ki ka enstale bit egzèsis ki gen diferan dyamèt.
7. Yo adopte estrikti mobil gantry a, machin nan kouvri yon ti zòn epi layout estriktirèl la rezonab.

8. Mouvman aks X gantry a adopte gidans pè ray lineyè woulant ak gwo kapasite pou pote, ki fleksib.
9. Machin nan ekipe ak yon aparèy pou ajiste sant zouti prentan an, ki ka fasilman idantifye pozisyon plak la.
10. Sistèm kontwòl la adopte lojisyèl pwogramasyon òdinatè siperyè ki devlope endepandamman pa konpayi nou an epi ki matche ak kontwolè pwogramasyon PLC, ak yon wo degre automatisation.
11. Ray gid machin nan ak nwa vis plon an ekipe ak yon aparèy wilaj otomatik.
12. Ray gid aks X la adopte yon kouvèti pwoteksyon teleskopik an asye pur, tou de bò ray gid aks y la adopte yon kouvèti pwoteksyon fleksib, epi yo ajoute yon deflektè ki enpèmeyab toutotou atelye a.
| NON. | Non | Mak | Peyi |
| 1 | Lray gid anndan | HIWIN/PMI | Taywann, Lachin |
| 2 | Chofè sèrvo | Mitsubishi | Japon |
| 3 | Smotè èrvo | Mitsubishi | Japon |
| 4 | Kontwolè pwogramasyon | Mitsubishi | Japon |
| 5 | Aparèy lubrifikasyon otomatik | BIJUR/HERG | Etazini / Japon |
| 6 | Còdinatè | Lenovo | Lachin |
Nòt: Sa ki anwo a se founisè estanda nou an. Li posib pou ranplase li ak konpozan menm kalite ki soti nan yon lòt mak si founisè ki anwo a pa ka founi konpozan yo an ka ta gen nenpòt pwoblèm espesyal.



Pwofil Konpayi an  Enfòmasyon sou faktori a
Enfòmasyon sou faktori a  Kapasite Pwodiksyon Anyèl
Kapasite Pwodiksyon Anyèl  Kapasite Komès
Kapasite Komès 





